원문링크
Unity Graphic Programing 보다가..
primitives
All primitives are centered at the origin. You will have to transform the point to get arbitrarily rotated, translated and scaled objects (see below).
Sphere - signed - exactfloat sdSphere( vec3 p, float s )
{
return length(p)-s;
} |  |
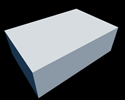
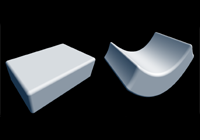
Box - unsigned - exactfloat udBox( vec3 p, vec3 b )
{
return length(max(abs(p)-b,0.0));
}
|  |
Round Box - unsigned - exactfloat udRoundBox( vec3 p, vec3 b, float r )
{
return length(max(abs(p)-b,0.0))-r;
}
|  |
Box - signed - exactfloat sdBox( vec3 p, vec3 b )
{
vec3 d = abs(p) - b;
return min(max(d.x,max(d.y,d.z)),0.0) + length(max(d,0.0));
}
| |
Torus - signed - exactfloat sdTorus( vec3 p, vec2 t )
{
vec2 q = vec2(length(p.xz)-t.x,p.y);
return length(q)-t.y;
} |  |
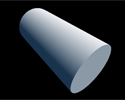
Cylinder - signed - exactfloat sdCylinder( vec3 p, vec3 c )
{
return length(p.xz-c.xy)-c.z;
} |  |
Cone - signed - exactfloat sdCone( vec3 p, vec2 c )
{
// c must be normalized
float q = length(p.xy);
return dot(c,vec2(q,p.z));
}
|  |
Plane - signed - exactfloat sdPlane( vec3 p, vec4 n )
{
// n must be normalized
return dot(p,n.xyz) + n.w;
}
|  |
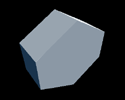
Hexagonal Prism - signed - exactfloat sdHexPrism( vec3 p, vec2 h )
{
vec3 q = abs(p);
return max(q.z-h.y,max((q.x*0.866025+q.y*0.5),q.y)-h.x);
}
|  |
Triangular Prism - signed - exactfloat sdTriPrism( vec3 p, vec2 h )
{
vec3 q = abs(p);
return max(q.z-h.y,max(q.x*0.866025+p.y*0.5,-p.y)-h.x*0.5);
}
|  |
Capsule / Line - signed - exactfloat sdCapsule( vec3 p, vec3 a, vec3 b, float r )
{
vec3 pa = p - a, ba = b - a;
float h = clamp( dot(pa,ba)/dot(ba,ba), 0.0, 1.0 );
return length( pa - ba*h ) - r;
} |  |
Capped cylinder - signed - exactfloat sdCappedCylinder( vec3 p, vec2 h )
{
vec2 d = abs(vec2(length(p.xz),p.y)) - h;
return min(max(d.x,d.y),0.0) + length(max(d,0.0));
}
|  |
Capped Cone - signed - boundfloat sdCappedCone( in vec3 p, in vec3 c )
{
vec2 q = vec2( length(p.xz), p.y );
vec2 v = vec2( c.z*c.y/c.x, -c.z );
vec2 w = v - q;
vec2 vv = vec2( dot(v,v), v.x*v.x );
vec2 qv = vec2( dot(v,w), v.x*w.x );
vec2 d = max(qv,0.0)*qv/vv;
return sqrt( dot(w,w) - max(d.x,d.y) ) * sign(max(q.y*v.x-q.x*v.y,w.y));
}
|  |
Ellipsoid - signed - boundfloat sdEllipsoid( in vec3 p, in vec3 r )
{
return (length( p/r ) - 1.0) * min(min(r.x,r.y),r.z);
}
|  |
Triangle - unsigned - exactfloat dot2( in vec3 v ) { return dot(v,v); }
float udTriangle( vec3 p, vec3 a, vec3 b, vec3 c )
{
vec3 ba = b - a; vec3 pa = p - a;
vec3 cb = c - b; vec3 pb = p - b;
vec3 ac = a - c; vec3 pc = p - c;
vec3 nor = cross( ba, ac );
return sqrt(
(sign(dot(cross(ba,nor),pa)) +
sign(dot(cross(cb,nor),pb)) +
sign(dot(cross(ac,nor),pc))<2.0)
?
min( min(
dot2(ba*clamp(dot(ba,pa)/dot2(ba),0.0,1.0)-pa),
dot2(cb*clamp(dot(cb,pb)/dot2(cb),0.0,1.0)-pb) ),
dot2(ac*clamp(dot(ac,pc)/dot2(ac),0.0,1.0)-pc) )
:
dot(nor,pa)*dot(nor,pa)/dot2(nor) );
}
|  |
Quad - unsigned - exactfloat dot2( in vec3 v ) { return dot(v,v); }
float udQuad( vec3 p, vec3 a, vec3 b, vec3 c, vec3 d )
{
vec3 ba = b - a; vec3 pa = p - a;
vec3 cb = c - b; vec3 pb = p - b;
vec3 dc = d - c; vec3 pc = p - c;
vec3 ad = a - d; vec3 pd = p - d;
vec3 nor = cross( ba, ad );
return sqrt(
(sign(dot(cross(ba,nor),pa)) +
sign(dot(cross(cb,nor),pb)) +
sign(dot(cross(dc,nor),pc)) +
sign(dot(cross(ad,nor),pd))<3.0)
?
min( min( min(
dot2(ba*clamp(dot(ba,pa)/dot2(ba),0.0,1.0)-pa),
dot2(cb*clamp(dot(cb,pb)/dot2(cb),0.0,1.0)-pb) ),
dot2(dc*clamp(dot(dc,pc)/dot2(dc),0.0,1.0)-pc) ),
dot2(ad*clamp(dot(ad,pd)/dot2(ad),0.0,1.0)-pd) )
:
dot(nor,pa)*dot(nor,pa)/dot2(nor) );
}
| |
Most of these functions can be modified to use other norms than the euclidean. By replacing length(p), which computes (x^2+y^2+z^2)^(1/2) by (x^n+y^n+z^n)^(1/n) one can get variations of the basic primitives that have rounded edges rather than sharp ones.
Torus82 - signedfloat sdTorus82( vec3 p, vec2 t )
{
vec2 q = vec2(length2(p.xz)-t.x,p.y);
return length8(q)-t.y;
} |  |
Torus88 - signedfloat sdTorus88( vec3 p, vec2 t )
{
vec2 q = vec2(length8(p.xz)-t.x,p.y);
return length8(q)-t.y;
} |  |
distance operations
The d1 and d2 parameters in the following functions are the distance to the two distance fields to combine together.
Unionfloat opU( float d1, float d2 )
{
return min(d1,d2);
}
|  | |
Substractionfloat opS( float d1, float d2 )
{
return max(-d1,d2);
}
|  | |
Intersectionfloat opI( float d1, float d2 )
{
return max(d1,d2);
}
|  |
domain operations
Where "primitive", in the examples below, is any distance formula really (one of the basic primitives above, a combination, or a complex distance field).
Repetitionfloat opRep( vec3 p, vec3 c )
{
vec3 q = mod(p,c)-0.5*c;
return primitve( q );
}
|  | |
Rotation/Translationvec3 opTx( vec3 p, mat4 m )
{
vec3 q = invert(m)*p;
return primitive(q);
}
|  | |
Scalefloat opScale( vec3 p, float s )
{
return primitive(p/s)*s;
}
|  |
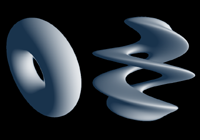
distance deformations
You must be carefull when using distance transformation functions, as the field created might not be a real distance function anymore. You will probably need to decrease your step size, if you are using a raymarcher to sample this. The displacement example below is using sin(20*p.x)*sin(20*p.y)*sin(20*p.z) as displacement pattern, but you can of course use anything you might imagine. As for smin() function in opBlend(), please read the smooth minimum article in this same site.
Displacementfloat opDisplace( vec3 p )
{
float d1 = primitive(p);
float d2 = displacement(p);
return d1+d2;
}
|  | |
Blendfloat opBlend( vec3 p )
{
float d1 = primitiveA(p);
float d2 = primitiveB(p);
return smin( d1, d2 );
}
|  |
domain deformations
Domain deformation functions do not preserve distances neither. You must decrease your marching step to properly sample these functions (proportionally to the maximun derivative of the domain distortion function). Of course, any distortion function can be used, from twists, bends, to random noise driven deformations.
Twistfloat opTwist( vec3 p )
{
float c = cos(20.0*p.y);
float s = sin(20.0*p.y);
mat2 m = mat2(c,-s,s,c);
vec3 q = vec3(m*p.xz,p.y);
return primitive(q);
}
|  | |
Cheap Bendfloat opCheapBend( vec3 p )
{
float c = cos(20.0*p.y);
float s = sin(20.0*p.y);
mat2 m = mat2(c,-s,s,c);
vec3 q = vec3(m*p.xy,p.z);
return primitive(q);
}
|  |
A reference implementation of most of these primitives and operators can be found here (click in the image to rotate the camera, or in the title to jump to the source code):
'Graphic Study' 카테고리의 다른 글
| GDC 2011 – Approximating Translucency for a Fast, Cheap and Convincing Subsurface Scattering Look (0) | 2018.05.31 |
|---|---|
| Advance in Real-Time Rendering - SIGGRAPH 2017 (0) | 2018.05.30 |
| Quick And Easy GPU Random Numbers In D3D11 (0) | 2018.05.15 |
| ASTC Format에 대해 (0) | 2018.03.23 |
| The Book of Shaders (0) | 2018.03.18 |